De la simulation aux opérations flotte de drones agricoles
1. Chaîne technologique représentée
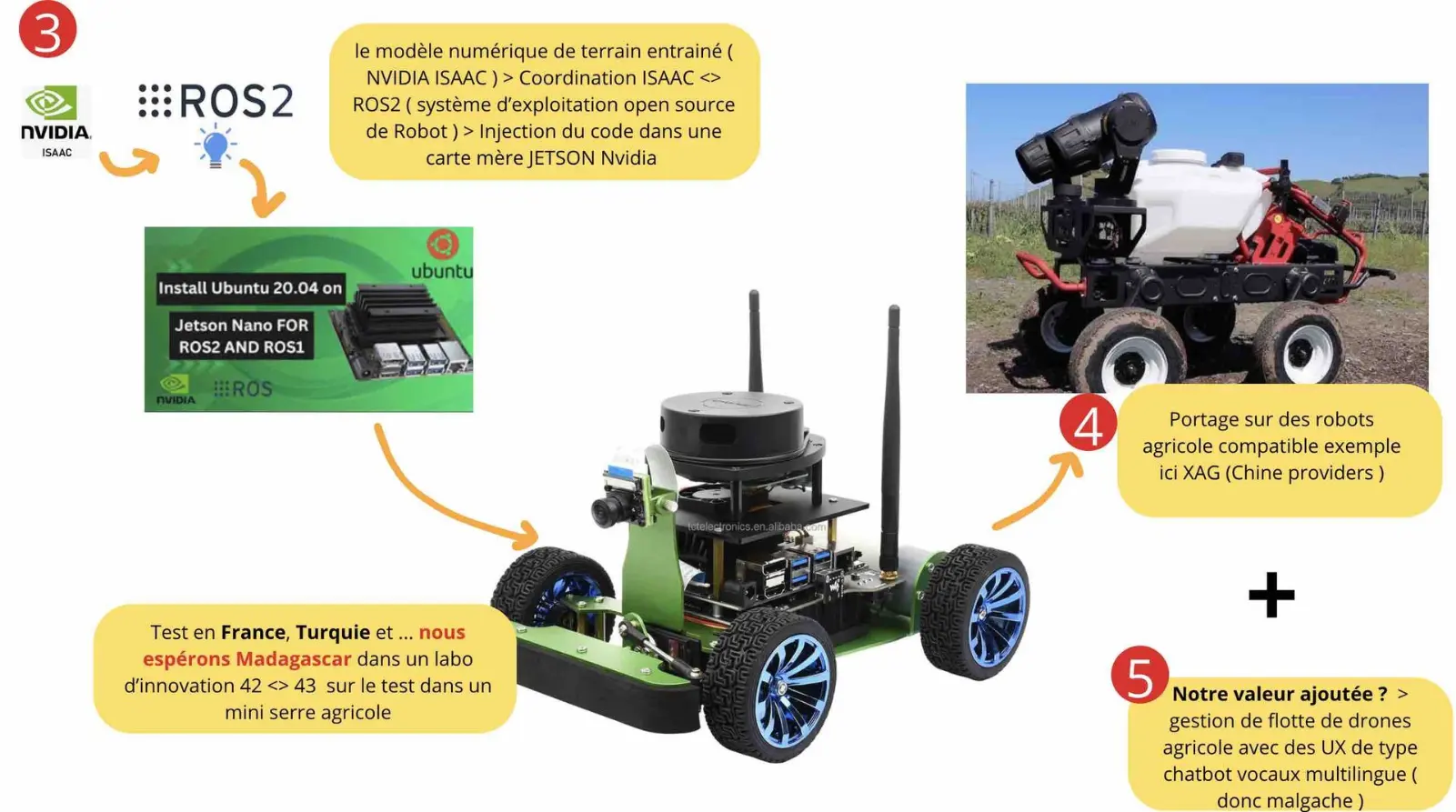
Étape 3 (gauche)
- Le modèle numérique de terrain est entraîné avec NVIDIA Isaac (simulation, perception, navigation).
- Coordination Isaac <-> ROS2 (système d’exploitation robotique open source).
-
Le code est ensuite injecté sur une carte Jetson NVIDIA (exemple : Jetson Nano avec Ubuntu 20.04 et ROS1/ROS2).
👉 Cela illustre le passage de la simulation numérique (digital twin) vers l’exécution embarquée dans un robot réel. - Matériel visible :
- Mini-robot 4 roues (avec caméra, LiDAR, antennes Wi-Fi) → utilisé pour tests en conditions contrôlées (serre agricole, terrain de démonstration).
- Ce prototype sert de banc d’essai pédagogique et technique avant passage à l’échelle.
2. Étape 4 (droite) : Portage industriel
- Le code et les algorithmes validés sont transposés sur des robots agricoles commerciaux.
-
Exemple montré : un robot de la société XAG (Chine), équipé d’un réservoir et d’une rampe de pulvérisation.
👉 But : montrer que les développements sur petit robot test sont scalables sur une flotte de machines agricoles existantes.
3. Étape 5 (bas droite) : Valeur ajoutée
-
Mise en avant de la couche logicielle différenciante :
- Gestion de flotte de drones/robots agricoles.
-
Interfaces utilisateurs via chatbots vocaux multilingues (notamment en malgache pour Madagascar).
👉 Cela permet une adoption locale plus facile par des exploitants ne parlant pas anglais/français, et répond à l’objectif d’inclusion numérique.
.
Dimension géographique et expérimentation
- Mention de tests prévus en France, Turquie et nous espérons Madagascar (dans un labo d’innovation type 42<>43, avec mini-serre agricole).
- >Stratégie multi-pays de validation avant déploiement réel.
- > Madagascar est identifié comme terrain pilote avec fort enjeu pédagogique et agricole.