Machines "secoue-arbres" (tree shakers)
Exemples de machines "secoue-arbres" (tree shakers)
Synthèse des fonctions principales
Ces machines sont souvent attelées à un tracteur, et fonctionnent selon deux grands principes :
- Par pince ou griffe hydraulique qui agrippe et secoue la base du tronc ou la charpentière.
- Par corde vibrante (rope shaker) attachée à une branche, qui provoque des vibrations.
Les fruits tombent ensuite dans des filets, des bâches ou des réservoirs de collecte placés autour ou sous l’arbre.
Oui, des machines existent bien et sont utilisées commercialement pour secouer les arbres et récupérer les fruits. On les trouve surtout dans les productions où la récolte manuelle est compliquée ou coûteuse (noix, amandes, olives, cerises, etc.). Il s’agit plus de machines agricoles spécialisées que de robots autonomes intelligents, mais certaines évoluent vers plus d’automatisme, notamment les modèles automatiques avec bâches de récupération intégrées (ex. GACEK, G-004 Pro).
JAGODA JPS – Tree Shakers
-
Cette entreprise propose plusieurs modèles :
- GACEK : pélican secoueur automatique pour cerises, prunes, etc. jagodaharvester.com
- G-004 Pro / G-004 : secoueurs automatiques avec bâches de récupération, pour pêches, amandes, olives, etc. jagodaharvester.com
- PESTKA – Trunk Shaker : secoueur de tronc, adapté aux gros arbres. jagodaharvester.com
- RS-100 Rope Tree Shaker : secoueur par corde pour diverses cultures (pommes, noix, amandes, etc.). jagodaharvester.com
Kadıoğlu Vibrope – Rope-Tree-Shaking Machine
- Modèle ajustable appelé Vibrope Master, conçu pour les noix, amandes, cerises, pommes, abricots, etc. nutmec.com
- C’est une machine qui se fixe au tracteur (PDF / prise de force), avec une corde métallique qui secoue l’arbre de façon contrôlée.
- nutmec.com
Orchard-Rite – Fruit Tree Shaker
- Spécialisée dans les machines auto-portées, utilisées surtout pour les noix.
- AgriExpo
Machine à secouer les orangers à Valence (Espagne)
- Par exemple, pour les orangers en milieu urbain, des tracteurs équipés de dispositifs de secouage sont utilisés, avec des filets pour récupérer les fruits.
- Voice of America
Kadir mechanical tree shaker
- Il existe aussi un article sur Wikipédia sur les mechanical tree shakers, utilisées aussi pour la récolte des noix de pécan, etc.
- Wikipédia
.
.
Liens utiles
-
JAGODA JPS – Tree Shakers
https://jagodaharvester.com/fruit-tree-shakers/ jagodaharvester.com -
Kadıoğlu Vibrope Master – Rope-Tree-Shaking Machine
https://nutmec.com/product/kadioglu-vibrope-master-rope-tree-shaking-machine-adjustable-shaking/ nutmec.com -
Orchard-Rite Fruit Tree Shaker
https://www.agriexpo.online/prod/orchard-rite/product-173908-56041.html AgriExpo -
Article sur les tree shakers (Wikipédia)
https://en.wikipedia.org/wiki/Mechanical_tree_shaker Wikipédia -
Reportage sur les tracteurs secouant les orangers à Valence
https://www.voanews.com/a/episode_fruit-shaking-tractor-shakes-trees-valencia-4588461/6115157.html Voice of America
Combinons modélisation numérique des terrains et navigations de flottes de drones robotisé pour ce genre d'opérations ?
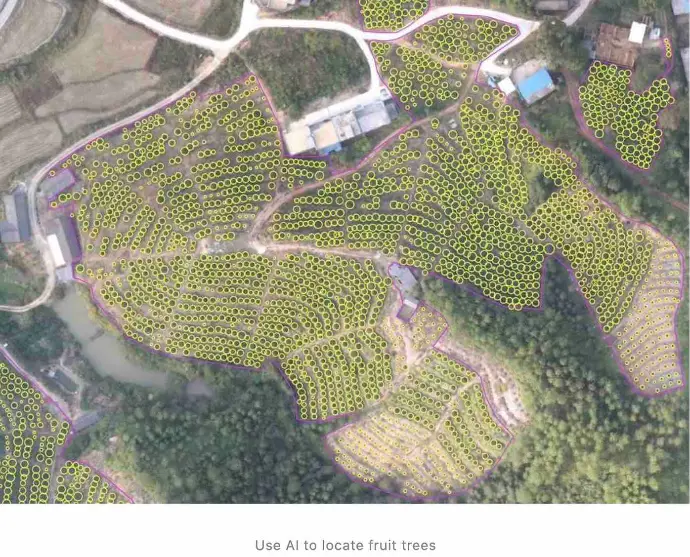
l’image montre un système d’IA appliqué à la détection automatique des arbres fruitiers dans un verger, utile pour la gestion intelligente et la robotisation des cultures.
Objectif de l’annotation
- Chaque cercle jaune correspond à la détection automatique d’un arbre.
- Le processus correspond à une application de computer vision (vision par ordinateur) utilisant probablement un modèle d’IA pour identifier les cimes des arbres.
-
Le but est de cartographier automatiquement la position des arbres fruitiers pour :
- comptage des arbres,
- suivi de l’état du verger,
- optimisation des interventions agricoles (irrigation, fertilisation, récolte)
1. Type de données
- L’image est probablement issue d’un drone ou d’un satellite à basse altitude.
- On observe des parcelles délimitées par des contours violets.
- À l’intérieur de chaque parcelle, des cercles jaunes sont superposés.
2. Objectif de l’annotation
- Chaque cercle jaune correspond à la détection automatique d’un arbre.
- Le processus correspond à une application de computer vision (vision par ordinateur) utilisant probablement un modèle d’IA pour identifier les cimes des arbres.
-
Le but est de cartographier automatiquement la position des arbres fruitiers pour :
- comptage des arbres,
- suivi de l’état du verger,
- optimisation des interventions agricoles (irrigation, fertilisation, récolte).
3. Organisation spatiale
- Les arbres sont disposés en lignes régulières, ce qui correspond à une plantation contrôlée (verger).
- Plusieurs zones sont séparées, peut-être différentes parcelles appartenant à divers propriétaires ou différentes variétés cultivées.
- Les zones boisées naturelles (en bas de l’image) ne sont pas annotées, ce qui montre que l’IA est entraînée à distinguer les arbres cultivés des autres.
4. Applications pratiques
- Agriculture de précision : mesurer la densité des arbres, détecter les manques ou les zones mal irriguées.
- Gestion des récoltes : anticiper la quantité de fruits disponible par parcelle.
- Planification logistique : optimiser les itinéraires des robots agricoles (comme les secoueurs d’arbres ou robots de récolte).
- Surveillance de la santé : combiner cette cartographie avec des images multispectrales (NDVI) pour surveiller l’état de chaque arbre.
.
Une solution « verger d’amandiers/pistachiers » de la carto jusqu’à la récolte.
Voici comment architecturer une solution « verger d’amandiers/pistachiers » de la carto jusqu’à la récolte.
1- Carto amont (depuis drone ou satellite)
- Détection d’arbres (votre image) → géopoints (GeoJSON/SHAPE) + rayon moyen de houppier.
- Export en waypoints par rang/ligne.
2) Simulation & mise au point (Isaac Sim)
- Import du verger (rangées, pentes, ornières).
- Robot (4×4 électrique ou enjambeur) + capteurs virtuels (LiDAR, stéréo, RTK) + bras « secoueur / pince ».
- Domain randomization (lumière, feuillage, poussière) pour rendre l’IA robuste.
- Boucle HIL/SIL avec votre stack ROS 2.
3- Robotique embarquée (ROS 2 sur Jetson)
- Jetson Orin (NX/AGX) ou équivalent.
- Capteurs : LiDAR 3D/2D, caméras stéréo/ToF, IMU, codeurs roues, RTK-GNSS (si couvert), butée ultrason (sécurité).
- Actionneur : pince secoueuse (ou pince + maillet percussion/vibreur) + toile/berceau de récupération ou convoyeur.
2) Pile logicielle (ROS 2)
Localisation/Navigation
- nav2 avec fusion ekf_localization (IMU+odom+GNSS).
- Suivi de rang (vision-based row following) + approche tronc (pose du tronc en caméra/LiDAR).
Perception
- Détection tronc & fût (segmentation / keypoints) → estimation pose 6D.
- Optionnel : détection du stade de maturité (couleur/texture) pour décider de secouer ou passer
Perception
- Contrôleur d’approche (impédance) → fermeture pince autour du tronc/branche cible.
- Profil de vibration commandé (amplitude/fréquence/rampe) avec retour couple/accélération.
- Détection fin de chute (capteurs dans berceau, micro/accéléro sur tronc).
Sécurité
- Zones interdites, arrêt d’urgence, reconnaissance personnes, anti-basculement (inclinomètre).
I/O & supervision
- Comptage récolte, carte de chaleur de rendement, logs pour traçabilité.
Exemple minimal de topologie ROS 2 (indicatif)
/waypoints → nav2 → /cmd_vel
/camera/image, /lidar/points → perception_node → /trunk_pose
/trunk_pose → manipulator_node → /gripper_cmd, /shaker_cmd
/berceau_events → harvest_logger
3) Points clés pour amandes/pistaches
- Méthode de récolte : le plus efficace reste le secouage contrôlé (fût ou grosse branche) + berceau/canopy pour collecter sans chute au sol.
- Contraintes agronomiques : éviter d’endommager l’écorce et les charpentières (limiter amplitude/temps, contrôle d’effort), respecter la fenêtre de maturité (humidité/noyau sec).
- Terrain : ornières/poussière → privilégier roues larges, 4×4 lent (≤ 3–5 km/h), garde au sol, capteurs placés à l’abri.
- GNSS parfois médiocre sous frondaison → combiner vision–lidar SLAM + RTK.
4) Plan MVP en 6 étapes
- Dataset de troncs/rangs (votre verger, 2–3 parcelles) + étiquetage.
- Prototype simulateur sous Isaac Sim (rangées + robot + capteurs).
- PoC perception (détection tronc + pose) validé en réel sur 50 arbres.
- Navigation de rang (nav2) + approche 0,3–0,5 m du tronc (±5 cm).
- End-effector : pince secoueuse instrumentée (capteur force/couple, IMU).
- Berceau de collecte (pliant) + comptage et traçabilité.
5) Matériel type (indicatif)
- Calcul : Jetson Orin NX/AGX, UPS 48 V → 24 V/12 V.
- Capteurs : LiDAR 32-64 lignes ou 2D + stéréo/ToF, IMU industrielle, RTK GNSS, ultrasons/ToF de proximité.
- Actionneur : pince hydraulique/électromécanique + vibreur (variateur), berceau toile/convoyeur.
6) Livrables logiciels
- Paquets ROS 2 (humble/iron) : row_following, trunk_pose_estimator, approach_controller, shaker_controller, harvest_logger.
- Scènes Isaac Sim : verger paramétrable, modèles arbres (LOD), plugin domain randomization.
- Bridge ROS 2 ↔ Isaac (ros2_bridge) pour tests HIL.